Ahh patents… I found a patent from 2001 that basically describes one of my ideas about automating the creation of auctions. They call it automated decision support for auctions. Why would you patent this?! Research sure, but a patent?
Month: March 2015
Speed up stevedoring
According to Container Tech a 40ft standard shipping container can have a max gross (container + contents) weight of 67,200 lb (or 30481.407 kg or 33.6 tons or an Adult North Pacific Right Whale). So, what is the quickest, easiest, safest and most energy efficient way to move such containers? According to current tech in the container moving industry it seems to be cranes. Big companies like http://www.kalmarglobal.com/ have been spending a lot of money automating and creating cranes. Is that really the best solution?
With current crane tech a human on average can unload 30 containers per hour or one every two minutes. Would massive conveyor belts work? Probably not. How about EM crane. Most likely we don’t want any magnets or electro magnets anywhere neat the cargo.
So, what then?
The fastest way would be to augment the ship and the port. The ship would be modular, allowing the cargo to be disconnected from the rest of the ship. Essentially becoming either one or multiple massive barges. Previously loaded “barges” would then be able to take their places and the ship would be able to proceed to its next destination. With this style of port you would be able to leave the massive ships out further at sea and then push/pull the barges using tugboats. Actually, the port could be adhoc, since the barges could lock together. This would seem to be very efficient… Main problem is designing a ship to be able to do such a thing in the ocean seems like a massive engineering problem. Then the next big problem is getting ports and shipping companies to convert to such a system. Buy/building a ship is an enormous cost. Actually the boat wouldn’t be that difficult I don’t think to build. The back end would house the engine, quarters, etc. The front would be built of connected (possibly stacked) barges. The main issue would be to not tip over when all of the barges have disconnected… But I think that as long as the remaining part of the ship is big enough everything should work. Then it is also relatively easy to attach the new cargo. So, I think the main issue then is really the fact that it is a totally different way to do shipping, so that would mean a lot of expenses. The cool part is the size of the ship can now be as big as you want since you don’t have to worry about ports. The main thing is you have be small enough to get through the Suez Canal. KalmarGlobal actually states in their vision of next gen ships that they will do this sort of thing… So, why aren’t we seeing small scale versions of this already? Money.
http://qz.com/477421/in-the-future-huge-ships-will-be-wind-powered-like-sailboats/ — (edit august 16 2015) qz did an article on the future of huge ships. they predict that they will be like sail boats.
*stevedoring – to load or unload the cargo of (a ship).
Power grid for shipping containers
Shocks in shipping containers that would charge batteries that would allow for gps tracking of all of the containers. Also, when stacked they could essentially distribute the electricity. Harvesting the energy from the force of tons of pressure would be interesting. Also, they could be very safe batteries!! You could use Lightsail storage. Then it would be also be eco-friendly as well. This would be pretty cool.
The gps would then allow for more effiecient logistics which would make the cost of new containers non-existent. At first not every container would even need to have the system installed.
Main concern is the weight of the lightsail system may be prohibitive… Also, if you want GPS units that always are on and not intermitant when ever you have the juice, we might need a better storage system…
Scratch that, right on their website the system claims to be able to be placed in a shipping container form. This makes me think that if you buy a few of these to generate the electricity for the rest of the system and then use relays to distribute the electricity when stacked then it would be perfect. Then each container would only require a simple battery that has properties that would make it work in such a system for a very long time with being able to charge and discharge at will. The great part is that the compression of the air will be done by moving the containers.
TurboJpeg to get yuyv images
This uses the turboJpeg library to do a decoding of a compressed jpeg to yuyv. TurboJpeg already converts the jpeg image to YUYV which is YUV 4:2:2 which is totally awesome since that is what we want!!
Can get libjpeg which comes with turboJpeg here and then do:
sudo dpkg -i libjpeg-turbo-official_1.4.1_i386.debTo compile your stuff check out the makefile. Mainly do:
gcc drew.c /opt/libjpeg-turbo/lib32/libturbojpeg.a -I /opt/libjpeg-turbo/include/
So, it looks like it should be easy to add in this to get the speed up for our camera.
It was easy to use, however I only got 15 frames/second! We need around 30 fps. 🙁
UPDATE: I got 30fps we are doing auto exposure which was slowing it down!!
Passwords
So yahoo has a new authentication system where it sends you a password to your device. This seems to be less secure than 2-factor authentication, however it certainly is a lot less of a hassle than having to make and change your password. The main issue is of course losing your phone. So, I guess it will be a good idea to keep a strong password on your phone. Main concern is how does yahoo confirm your identity if you loose your phone and want to change to a different phone?
My Attempt
The main issue is that of white on white which I can’t seem to get past other than extreme changes to the color as described in an earlier post. Probably, if that turns out to be a thing that would just be applied if I couldn’t see any posts and only if I believed that I probably would be looking toward the goal posts anyway.
First do the most obvious a houghp and maybe try a contour to try and get the goal posts etc. Also, use the fact that there is a horizon and that I only need to see the goal, ball and lines. I don’t need to really see the field. If I don’t see lines, goal, ball then it really doesn’t matter if I see green for a field. So, a houghp and reasonable settings should get the field lines, goal posts and the ball as long as the horizon is used correctly.
A big problem with the ball and the field lines is that they are both white and that with other robots obstructing the ball from view. This probably won’t be a problem in the competition, but it is for the goalie. So, I think we will need to add some logic. Like assume ball if not “line like” meaning it doesn’t extend.
Breaking Camouflage
I’ve found two methods for breaking camouflage (from this paper)
1. Multiple Camouflage Breaking by C0-Occurrence and Canny
2. Convexity-based Visual Camouflage Breaking
So, I’m starting to hope we really don’t need this…
CloudSight doesn’t even work given the images that the Canny paper (1) can deal with. So, CloudSight must not be too cutting edge because I’d think that they would have that. 😉
Structural Analysis
The next step would be to look into the structural analysis in opencv and convexity defects… Nevermind…. that is after you have the points do you do this. I need the points. It might be useful for identifying hands or fingers, but don’t need it for goal posts.
Competitors Goal code
Breaking Countershading
So, I just had to play around with the colors of the picture that Canny couldn’t detect (and still can’t) but now there is a distinct green color for the white “goal post”! That could then be id’ed by blob detection which we have now.
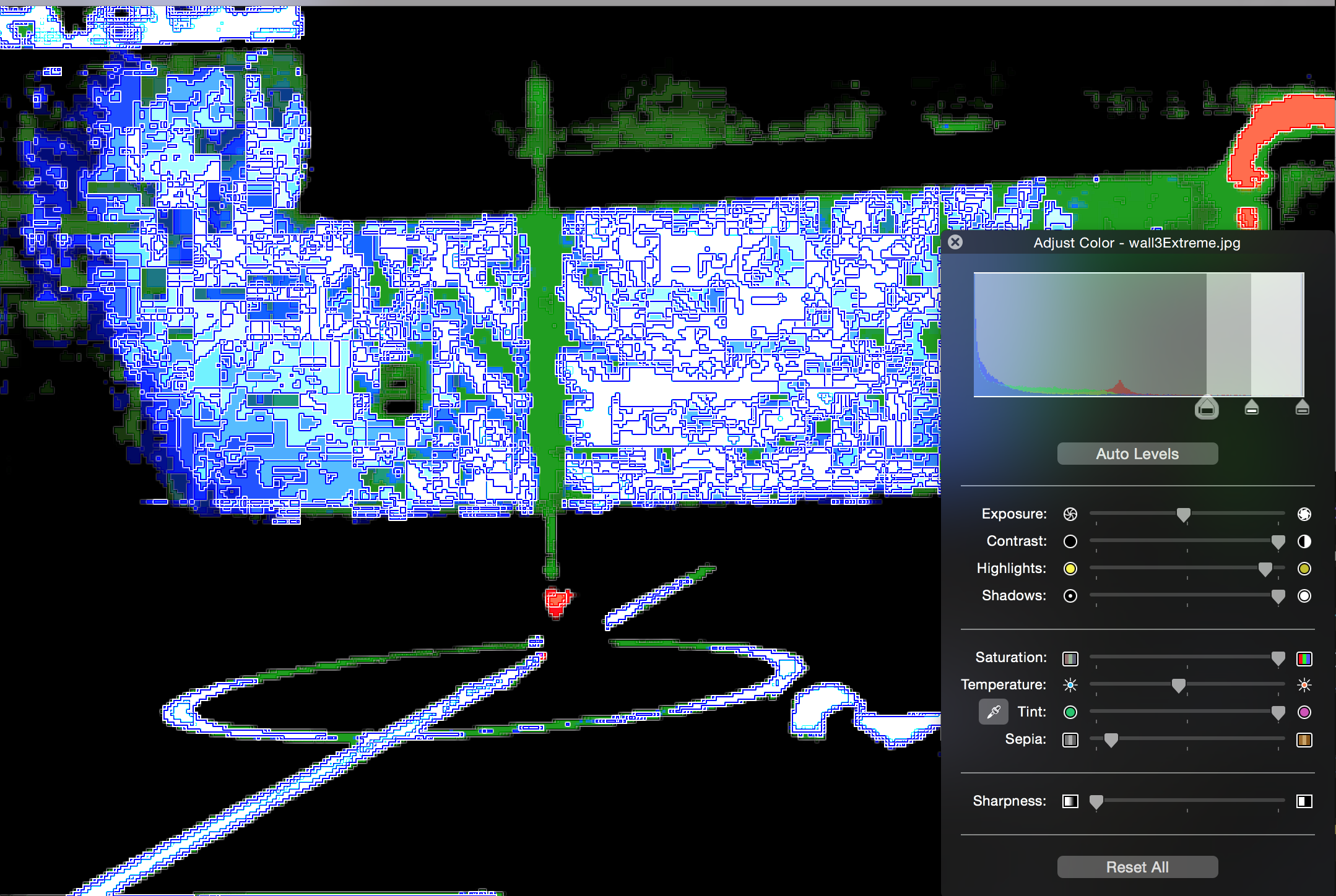
However, how to do this programmatically is beyond me! Because if I could get this automatically, in any light setting and in real time I could detect the goal posts easily since this is the most extreme case.
Essentially this is trying to solve the countershading problem. Where the object is camouflaged. Only due to extreme manual manipulation of the image color settings was I able to produce this. How do we create computer vision that can pick out countershaded objects? This paper maybe could be used to automate this if I understand it correctly.
Also, there are some wikipedia things like tone mapping and the other related articles. Being able to adjust the color and contrast seems to be important. However, this is only one image and NOT thus not really saying much. For example, with similar settings on the wall cluttered version I get a totally different color (pink) for the post:

So, to conclude, I think the way to go is what Sean had recommended from the beginning which is what Peter Stone does (I think). Learn standard background images for the camouflaged objects! Like in this. For one thing, I think dynamically adjusting the contrast and other color settings would be pretty time intensive since it is a pixel-by-pixel change. So, this seems more of a hack. Learning the background and subtracking it from the current image to extract the goal posts seems like a viable solution? Still not sure how that will work if the background is white and the posts are white. So far, no solution…